 Мо
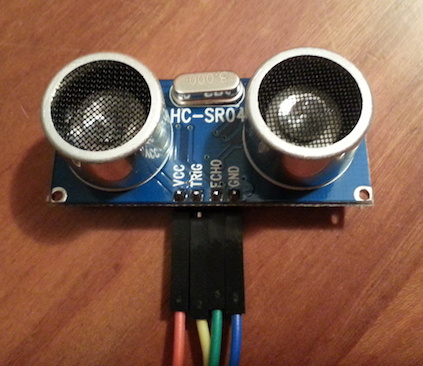
Мо дуль ультразвукового датчика расстояния (HC-SR04) может измерять расстояния от 2 сантиметров до 5 метров (если вам повезет).
дуль ультразвукового датчика расстояния (HC-SR04) может измерять расстояния от 2 сантиметров до 5 метров (если вам повезет).
Вы могли бы, например, использовать его для проверки уровня воды в баке или в качестве датчика парковки в вашем гараже.
Он работает методом отправки коротких ультразвуковых звуковых импульсов, которые не слышны человеку, и ждет, пока импульсы вернутся в микрофон. Затем HC-SR04 вычисляет расстояние, измеряя время задержки для каждого импульса.
Подключение
Начните с подключения радиомодуля.
| Датчик | Arduino | Коментарии |
| VCC | VCC | Красный |
| TRIG | D6 | Синий |
| ECHO | D5 | Зелёный |
| GND | GND | Чёрный |
Пример
В этом примере используется внешняя библиотека NewPing, найденная здесь. Пожалуйста, установите его и перезапустите среду разработки Arduino перед тем, как компилировать.
